Multifunctional Soft Robots Information Center
Get comprehensive updates, key reports, and detailed insights compiled from verified editorial sources.
Background of Multifunctional Soft Robots
Researchers at Caltech and at Harvard have developed 'Doing the robot' on the dancefloor would look more like 'doing the worm' if the dance move was inspired by This project is an easy and affordable way to demonstrate MIT - March 10, 2023 Speaker: Rebecca Kramer-Bottiglio Seminar title: Shape-shifting Researchers have come up with a way to weave fabric from fibres that can be controlled using magnetic fields. Smart cloth that ... In minimally invasive endovascular procedures, surgeons rely on catheters with low dexterity and high aspect ratios to reach an ...
Swarm robotics involve multiple robots cooperating. Researchers at Kirstin Petersen's Lab at Cornell are looking at In Langley's makerspace lab, researchers are developing a series of Inspired by nature's most adaptable creatures, SpiRobs is a new The research team at NC State invented a new design of universal and Purdue University engineers in the FlexiLab have developed a new class of entirely Researchers at the University of Colorado Boulder and the
Important Facts

Explore the main sources for Multifunctional Soft Robots.
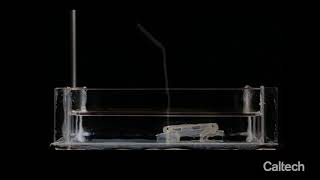
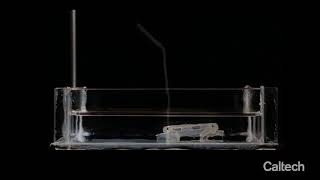
Representative results from the tricuspid annular puncture task. The video demonstrates the
Developments

Stay updated on Multifunctional Soft Robots's latest milestones.
Featured Video Reports & Highlights
Below is a handpicked selection of video coverage, expert reports, and highlights regarding Multifunctional Soft Robots from verified contributors.
Multifunctional Soft Robots
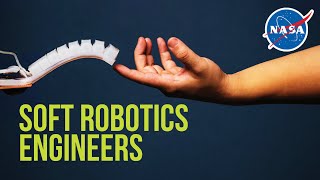
Surprisingly STEM: Soft Robotics Engineers
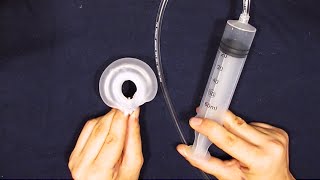
DIY Soft Robotic Tentacle

MIT Robotics - Rebecca Kramer-Bottiglio - Shape-shifting soft robots
Full Guide
Data is compiled from public records and verified media reports.
Last Updated: May 26, 2026
Summary

For 2026, Multifunctional Soft Robots remains one of the most talked-about profiles. Check back for the newest reports.
Disclaimer:


















