Mit Humanoid Kong Trajectory Optimization Information Center
Get comprehensive updates, key reports, and detailed insights compiled from verified editorial sources.
Overview of Mit Humanoid Kong Trajectory Optimization

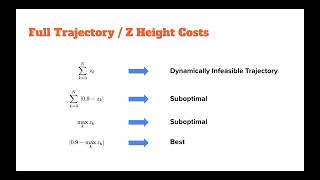
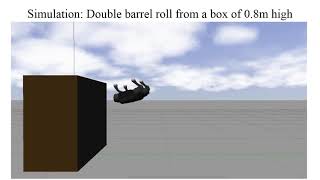
6.8210 Underactuated Robotics Final Project In which we make a Video for our IEEE Robotics and Automation Letters (RA-L) 2025 paper: "Contact-Implicit Whole-Body Performing highly agile acrobatic motions with a long flight phase requires perfect timing, high accuracy, and coordination of the ... Learning Movement Primitives from Optimal and Dynamically Feasible Trajectories for Humanoid Walking Multi-task prioritized controllers generate complex behaviors for Full paper and additional information available at Publication: "
Okay and you can imagine now that writing a optimization problem if i wanted to do The main idea of this work is to use data from full-body simulation of ICRA 2014 Predicting Initialization Effectiveness for Paper, video, open-source code, slides and more: Intro: 00:29 - Why Legged Robots? 01:15 - Context of ...
Key Details

Explore the key sources for Mit Humanoid Kong Trajectory Optimization.
Latest News

Stay updated on Mit Humanoid Kong Trajectory Optimization's newest achievements.
Featured Video Reports & Highlights
Below is a handpicked selection of video coverage, expert reports, and highlights regarding Mit Humanoid Kong Trajectory Optimization from verified contributors.
MIT Humanoid Kong Trajectory Optimization
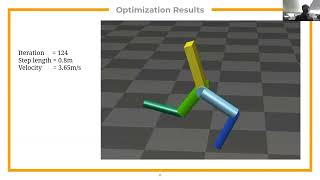
Trajectory Optimization for a Running Humanoid
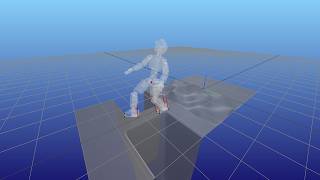
Contact-Implicit Whole-Body Trajectory Optimization for Dynamic Humanoid Locomotion
Contact-timing and Trajectory Optimization for 3D Jumping on Quadruped Robots
Full Guide
Data is compiled from public records and verified media reports.
Last Updated: May 26, 2026
Final Thoughts

For 2026, Mit Humanoid Kong Trajectory Optimization remains one of the most searched-for profiles. Check back for the newest reports.
Disclaimer:


















