Opencn Trajectory Optimization Information Center
Get comprehensive updates, key reports, and detailed insights compiled from verified editorial sources.
Overview of Opencn Trajectory Optimization

We introduce a new problem of continuous, coverage-aware Clik Transition from Hover to Level Flight using GPOPS A pre-recorded version of our presentation at the 2021 International Conference on Robotics and Automation. Authors: Matthew ... SpaceWorks® QuickShot™ is fully featured software suite that is intuitive, fast, and at the cutting edge of stochastic A quadrupedal robot balances itself while entering different contact states with the environment. MathWorks MY026 (UKM) "Like" in to cast your vote! Voting ends 14th August 2015 ...
Source code: Sorry for the overall bad video and animation quality. The Ensemble Iterative Linear Quadratic Regulator (EiLQR) method is used here to perform a helicopter landing on a moving ship ... We study the nonlinear observability of a system's states in view of how well they are observable and what control inputs would ...
Key Details

Explore the primary sources for Opencn Trajectory Optimization.
Developments

Stay updated on Opencn Trajectory Optimization's newest achievements.
Featured Video Reports & Highlights
Below is a handpicked selection of video coverage, expert reports, and highlights regarding Opencn Trajectory Optimization from verified contributors.
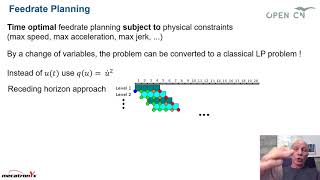
OpenCN - Trajectory optimization
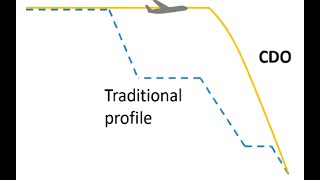
trajectory optimization (ATM course, Linkoping U)
Introduction to Trajectory Optimization

C-OPT: Coverage-Aware Trajectory Optimization Under Uncertainty
Expert Insights
Data is compiled from public records and verified media reports.
Last Updated: May 26, 2026
Future Outlook

For 2026, Opencn Trajectory Optimization remains one of the most searched-for profiles. Check back for the latest updates.
Disclaimer:





![[ICRA 2021 - Presentation] Online Trajectory Optimization for Aerial Motions of a Quadruped Robot](https://i0.wp.com/ytimg.googleusercontent.com/vi/yEt1p-WZToo/mqdefault.jpg?resize=320,180)








![Scenario-Based Trajectory Optimization in Uncertain Dynamic Environments [ICRA Presentation]](https://i0.wp.com/ytimg.googleusercontent.com/vi/_xZOwROdi8s/mqdefault.jpg?resize=320,180)

![[Tutorial] Optimization, Optimal Control, Trajectory Optimization, and Splines](https://i0.wp.com/ytimg.googleusercontent.com/vi/j82Ia436DYY/mqdefault.jpg?resize=320,180)